

* ご注文金額が税込2万円以上の場合は配送料無料になります。








ID STシリーズ 2相ステッピングモータDC入力ドライバ
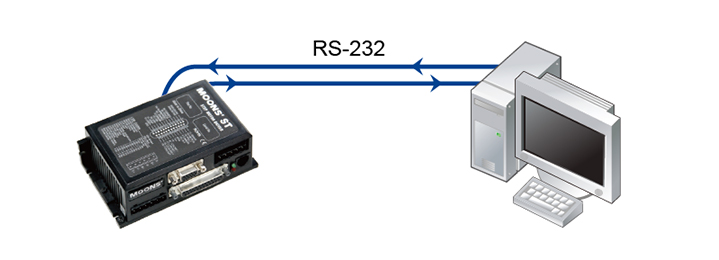
STシリーズステッピングモータドライブ製品はスタンドアロン・プログラミングが可能となるほか、RS-232/485、Ethernet UDP/TCP、CANopen及びEtherNet/Iptleなどにも適用できる。
● 共振抑制
● より滑らかな回転を可能にするマイクロステップエミュレーション
● トルクリップルの平滑化により、低速でも滑らかな回転を実現
● ストール検出機能とストール防止機能
● より滑らかな回転を可能にするマイクロステップエミュレーション
● トルクリップルの平滑化により、低速でも滑らかな回転を実現
● ストール検出機能とストール防止機能
 保証:
保証:




概要
電流制御アルゴリズムだけではなく、強大なプログラミングソフトと制御論理を備えていた一体型スマートドライバです。プログラムをドライバ中に書き込んで保存でき、多軸システムの場合にデジタル信号或はスイッチ信号を通じで保存されたプログラムを使用できます。ユーザー様に対してシステムの構造が更に簡単になります。また、RS232、RS485、Modbus、CANOpenとEthernetバスでリアルタイムを制御し、ホストコンピューターの作業量を大幅に減少し、有効的にモーションコントロール・システムの開発コストと開発周期を短縮します。STシリーズにはエンコーダフィードバックインターフェースがオプションとして選択され、クローズドループ制御を実現させ、モータの性能及び信頼性を向上させます。
特徴
振動抑制モータには固有の振動領域があり、STシリーズドライバは共振点を自動的に計算し、制御アルゴリズムを見直し、その振動領域を避けるような設定を行います。この技術で中間周波数の安定性を大幅に向上させ、高速領域にもハイトルクを実現します。
より優れた高速性能
より優れた高速性能
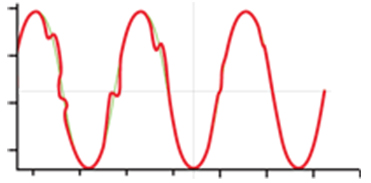
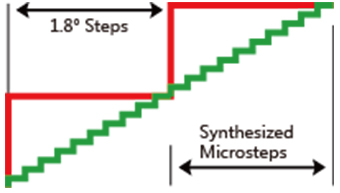
マイクロステップ技術モーターの基本ステップ角度をモーターコイルに流す電流を制御することで細分化し、滑らかな運転がおこなえます。
より滑らかな運転表現
より滑らかな運転表現
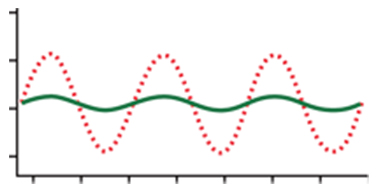
低速回転時のトルクが安定になる低速領域のトルク曲線を分析することで、サージ吸収の回路条件を変えることにより振動エネルギーを吸収させ、安定な低速回転を実現できます。より滑らかな低速運転
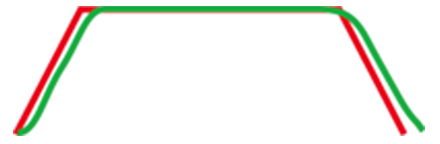
入力信号の安定化速度フィルタと位相フィルタにより、ワークへのショックを少なくしたり、より滑らかなモータ運転を実現するともに機械摩耗を軽減できます。
より安定なシステムパフォーマンス
より安定なシステムパフォーマンス
自己診断及び自動設定電源を入れたときドライバは自動的にモータデータ(抵抗値と電磁誘導係数など)を診断し、診断結果により運転性能を調整します。
制御モード
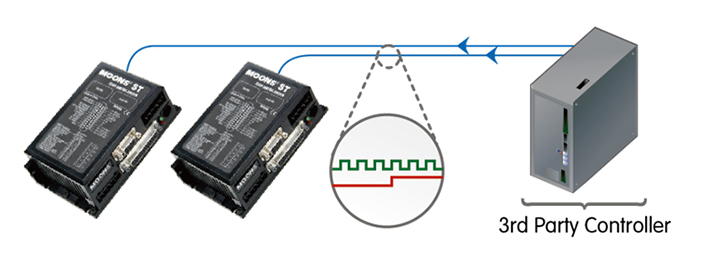
 ◆パルス&方向
◆パルス&方向◆ダブルパルス
◆直角位相パルス(エンコーダ追従)
◆通信方式及びソフトで設定
 ◆ソフト配置
◆ソフト配置◆2段速自由に切り替え
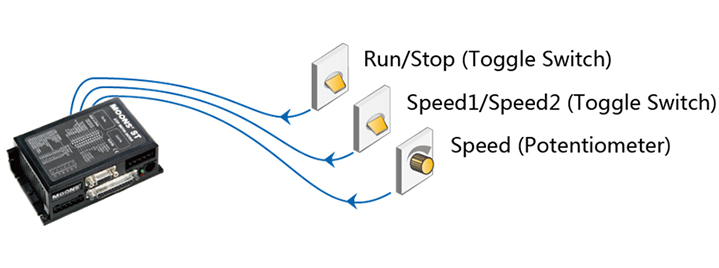
◆速度アナログ制御
◆操作レバー制御(互換性あり)
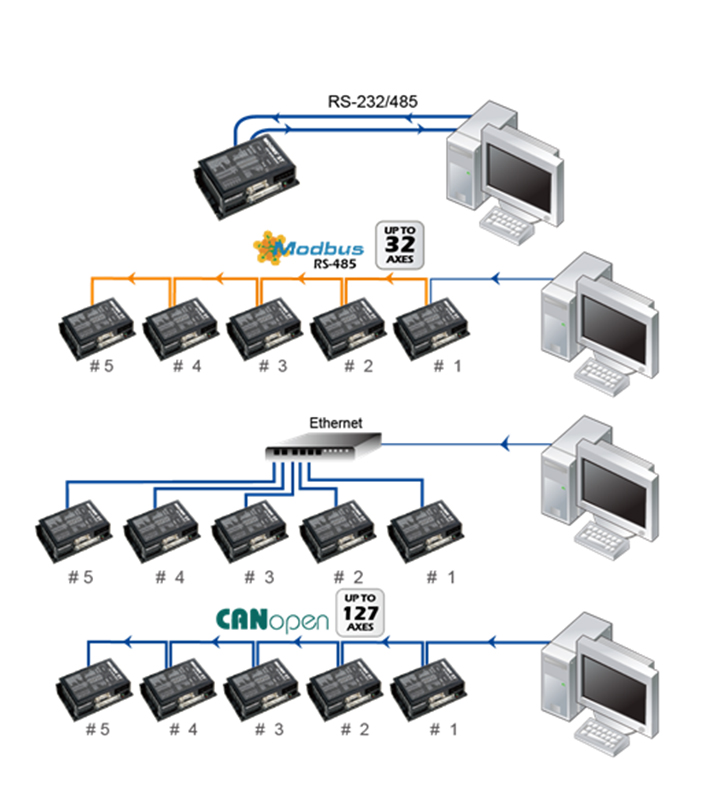
 ◆ホストPCやPLC指令受け
◆ホストPCやPLC指令受けRS‐485或はModbus/RTUネットワーク
◆ホストPCやPLC指令受け
◆最大で32軸の多軸制御に対応可能
◆ホストPCやPLC指令受け
◆EthernetとEthernet/IPに基づいて1000軸の制御を実現する
◆CANopen型
◆CANopenネットワークに接続でき
◆CiA301とCiA402プロトコルに対応可能
◆最大で127軸の多軸制御に対応可能
 ◆テキストベースのプログラム言語を用いる
◆テキストベースのプログラム言語を用いる◆プログラムのダウンロード、保存、実行
◆高い機能:マルチスレッド、条件式プログラミングと数学函数など
◆Qプログラムを実行する時ホストと通信可能
品番の見方
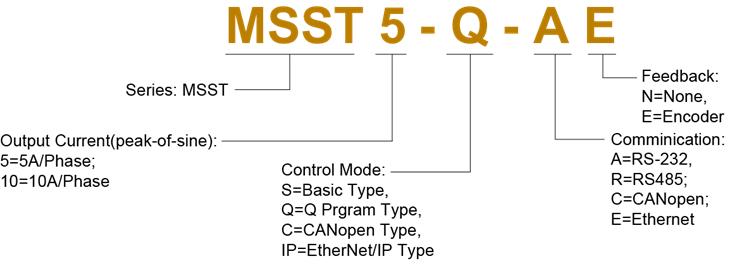
ST二相直流シリーズ
| Model | Control | Current | Input Voltage | Encoder | RS-232 | RS-485 | CANopen |
| MSST5-S | S | 0.1-5A | 24-48VDC | √ | |||
| MSST10-S | 0.1-10A | 24-80VDC | √ | ||||
| MSST5-Q-AN | Q | 0.1-5A | 24-48VDC | √ | |||
| MSST5-Q-AE | √ | √ | |||||
| MSST5-Q-RN | √ | √ | |||||
| MSST5-Q-RE | √ | √ | √ | ||||
| MSST10-Q-AN | 0.1-10A | 24-80VDC | √ | ||||
| MSST10-Q-AE | √ | √ | |||||
| MSST10-Q-RN | √ | √ | |||||
| MSST10-Q-RE | √ | √ | √ | ||||
| MSST5-C-CN | C | 0.1-5A | 24-48VAC | √ | √ | ||
| MSST5-C-CE | √ | √ | √ | ||||
| MSST10-C-CN | 0.1-10A | 24-80VAC | √ | √ | |||
| MSST10-C-CE | √ | √ | √ |
Power Amplifier
| Amplifier Type | Dual H-Bridge, 4 Quadrant |
| Current Control | 4 state PWM at 20 KHz |
| Protection | Over-voltage, under-voltage, over-temp, internal motor shorts (phase-to-phase, phase-to-ground) |
| Idle Current | Automatic idle current reduction to reduce heat after motor stops moving, software selectable current and idle delay |
| Microstep Resolution | Software selectable from 200 to 51200 steps/rev in increments of 2 steps/rev |
| Microstep Emulation | Performs high resolution stepping by synthesizing fine microsteps from coarse steps. Reduces jerk and extraneous system resonances. |
| Anti-Resonance | Raises the system damping ratio to eliminate midrange instability and allow stable operation throughout the speed range and improves settling time |
| Torque Ripple Smoothing | Allows for fine adjustment of phase current waveform harmonic content to reduce low-speed torque ripple in the range of 0.25 to 1.5 rps |
| Encoder Feedback | Optional encoder feedback for stall detection and stall prevention |
| NonVolatile Storage | Configurations are saved in FLASH memory on-board the DSP |
| Humidity | 90% non-condensing |
| Ambient Temperature | 0 - 40°C when mounted to a suitable heat sink |
| Mass | -S: Approx. 0.2Kg, -Q/C/IP: Approx. 0.3Kg |
| I/O Specifications-S | STEP, DIR inputs: Optically isolated, differential, 5 VDC, minimum pulse width = 250 ns, maximum pulse frequency = 2 MHz EN input: Optically isolated, 5-12 VDC OUT output: Optically isolated, 24 VDC max, 10 mA max AIN analog input: Range = 0-5 VDC, resolution = 12 bits |
| I/O Specifications-Q/C/IP | X1, X2 inputs: Optically isolated, differential, 5 VDC, minimum pulse width = 250 ns, maximum pulse frequency = 2 MHz X3-X6 inputs: Optically isolated, single-ended, shared common, sinking or sourcing, 12-24 VDC X7, X8 inputs: Optically isolated, differential, 12-24 VDC Y1-Y3 outputs: Optical darlington, single-ended, shared common, sinking, 30 VDC max, 100 mA max Y4 output: Optical darlington, sinking or sourcing, 30 VDC max, 100 mA max Analog inputs IN1, IN2: Can be used as two single-ended inputs or one differential input. Range =software selectable 0-5, +/-5, 0-10, or +/-10 VDC. Software configurable offset, deadband, and filtering. Resolution = 12 bits (+/-10 volt range), 11 bits (+/-5 or 0-10 volt range), or 10 bits (0-5 volt range). |
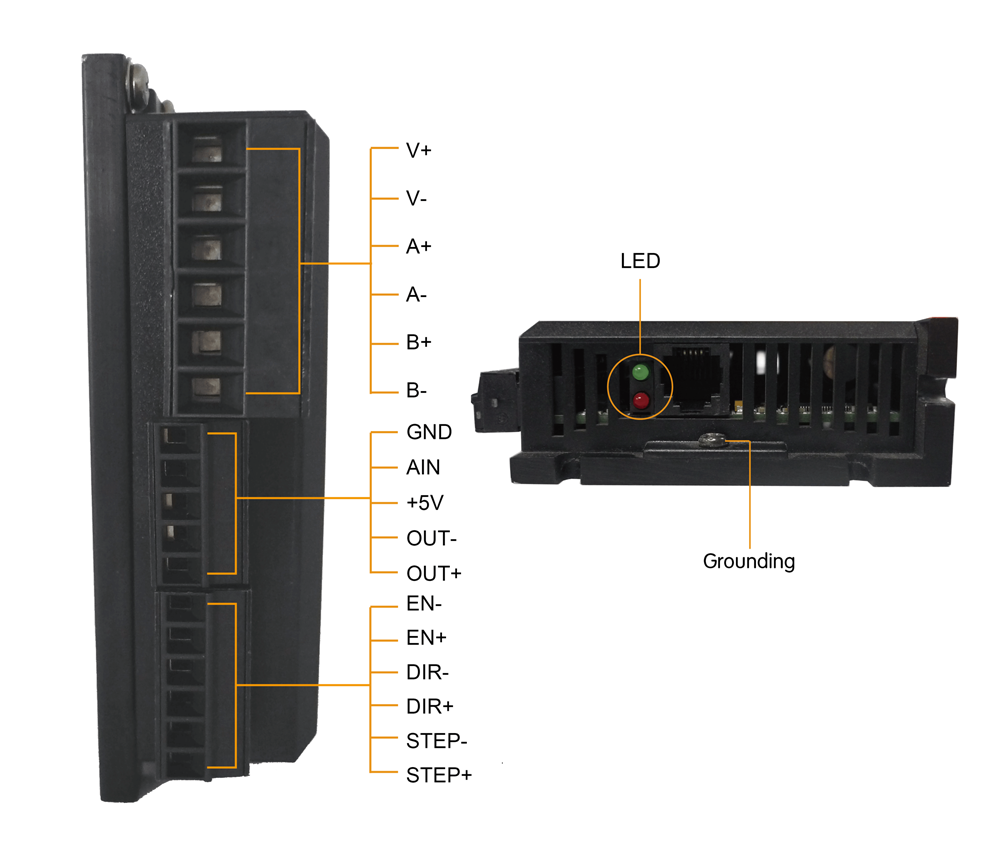
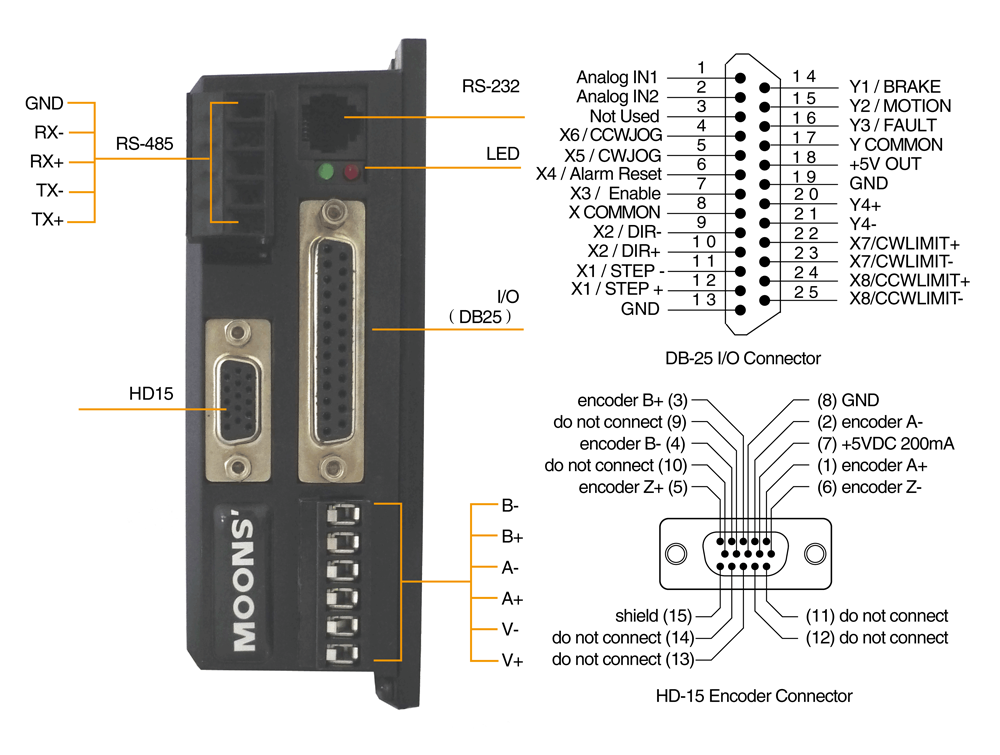
| ►Communication Port ■ MSST5/10-S 
| ||
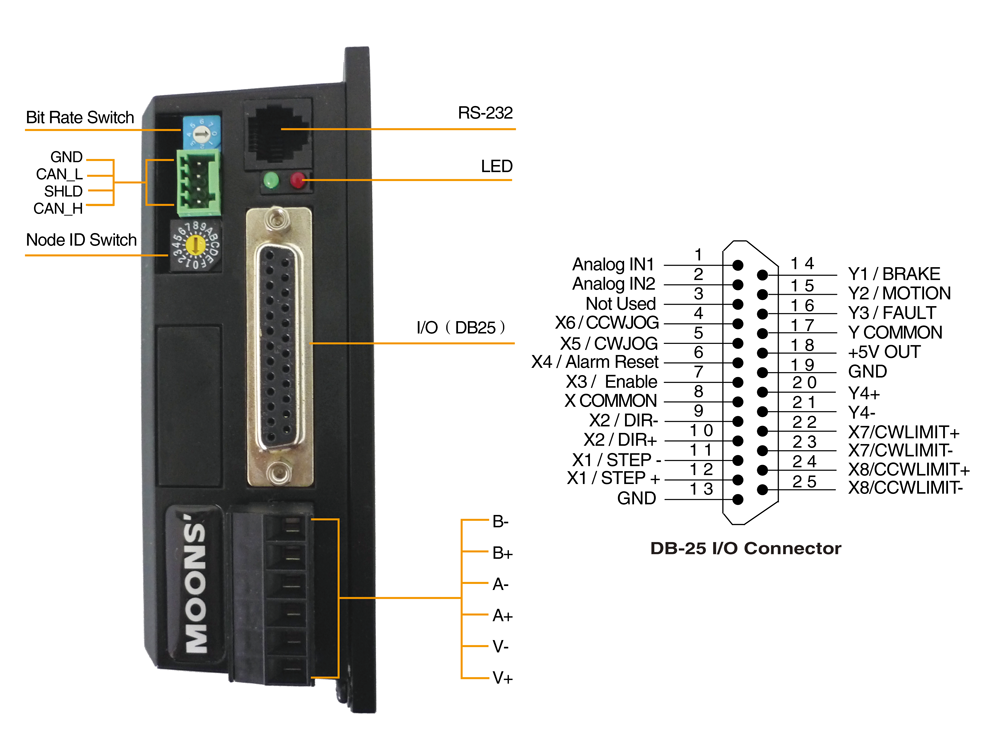
■ MSST5/10-Q
| ||
■ MSST5/10-C
|
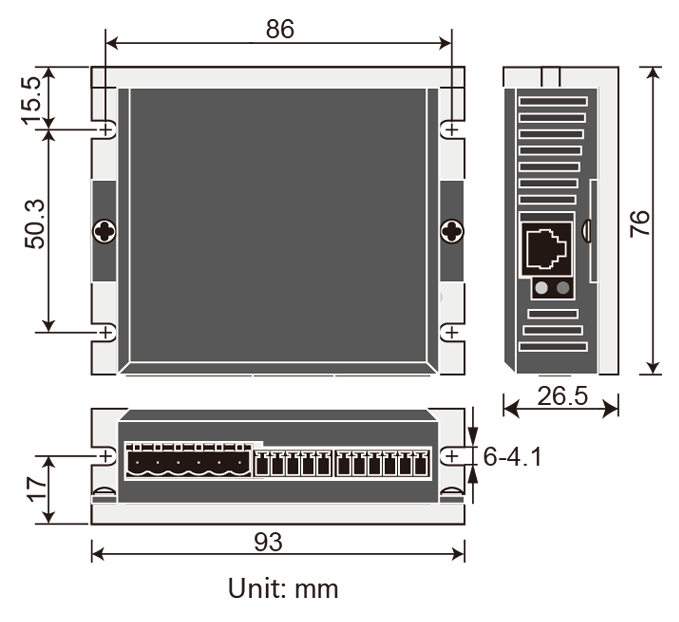
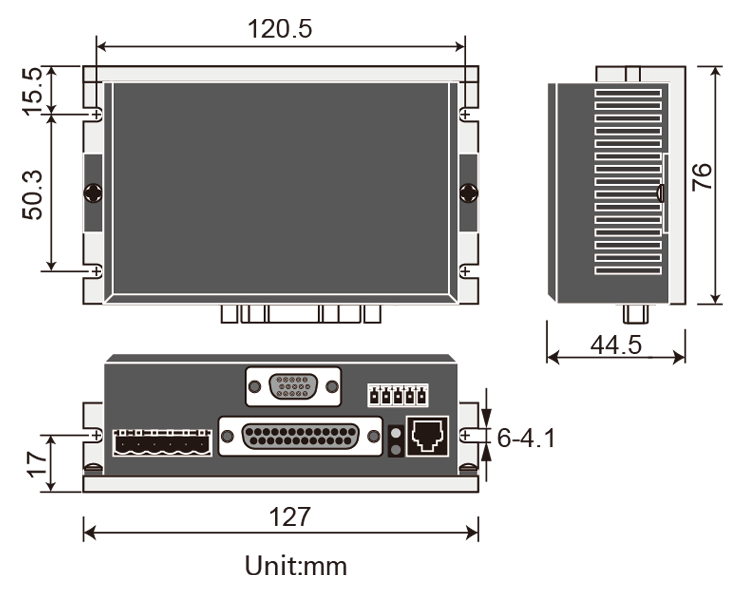
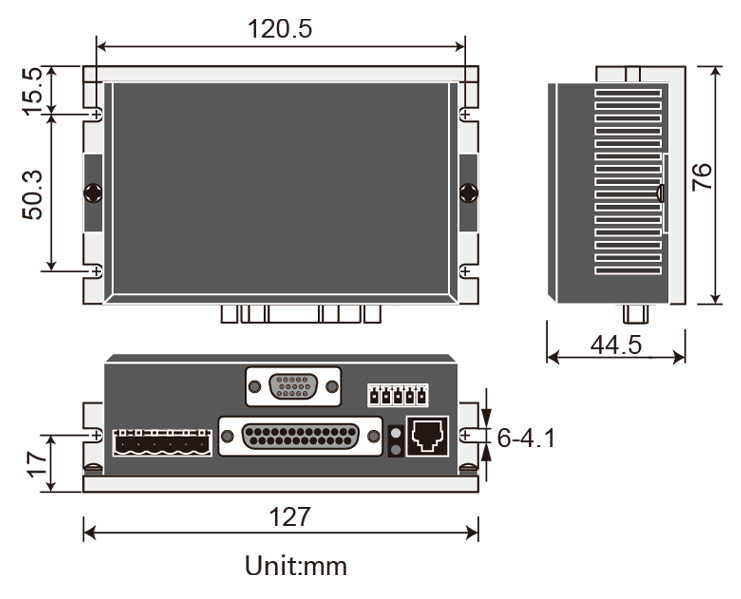
2D図面
| タイトル | タイプ | サイズ(KB) | ダウンロード |
|---|---|---|---|
| MSST5/10-S 2D図面.pdf | 21 | ||
| MSST5/10-S 2D図面.dwg | DWG | 155 |
3Dモデル
| タイトル | タイプ | サイズ(KB) | ダウンロード |
|---|---|---|---|
| MSST5/10-S 3Dモデル.STEP | STEP | 538 |
カタログ
| タイトル | タイプ | サイズ(KB) | ダウンロード |
|---|---|---|---|
| MSST シリーズ カタログ.pdf | 2835 |
マニュアル
| タイトル | タイプ | サイズ(KB) | ダウンロード |
|---|---|---|---|
| MSST-S_UserManual_EN20250722.pdf | 5914 | ||
| MSST5/10-S マニュアル.pdf | 4889 |
認証取得
| タイトル | タイプ | サイズ(KB) | ダウンロード |
|---|---|---|---|
| MSST シリーズ CE.pdf | 119 | ||
| MSST シリーズ RoHS.pdf | 264 |
配送について
お客様からご注文いただいた商品はすべて、一品一品丁寧に梱包いたします。便利なオンライン注文、且つ高品質な梱包と迅速な輸送を我々が保証します。
迅速な輸送サービス
越境EC配送をより迅速に MOONS'は海外発送業務の大部分を大手国際物流会社の代表として知られているDHLに委託しており、世界中のお客様へより安心・迅速な輸送サービスをご提供いたします。お届け予定日について(例):中国からアメリカの主要都市まで送る場合は約3営業日以降になります。


安心で高品質な梱包
長時間輸送に対応できるようにするため、MOONS'は丈夫な構造を持ち、落下試験にもクリアし、リサイクル材料から作られた個別包装を使用しております。MOONS'はより安心で高品質な梱包サービスをご提供いたします。
過酷な環境に耐える製品ラベル
MOONS'は厳しい環境への応用を予想し、耐水性試験・耐久性試験・耐熱性試験、及び耐食性試験にクリアした製品ラベルを使用しております。
図:ステッピングモータ製品専用の製品ラベルです。