* Free shipping to North America and most of Europe for orders of $100 or more
- Home
- Integrated Motors
- Integrated Stepper Motors
- Integrated Step-Servo Motors
- TSMX Series Integrated Step-Servo Motors










ID TSMX Series Integrated Step-Servo Motors
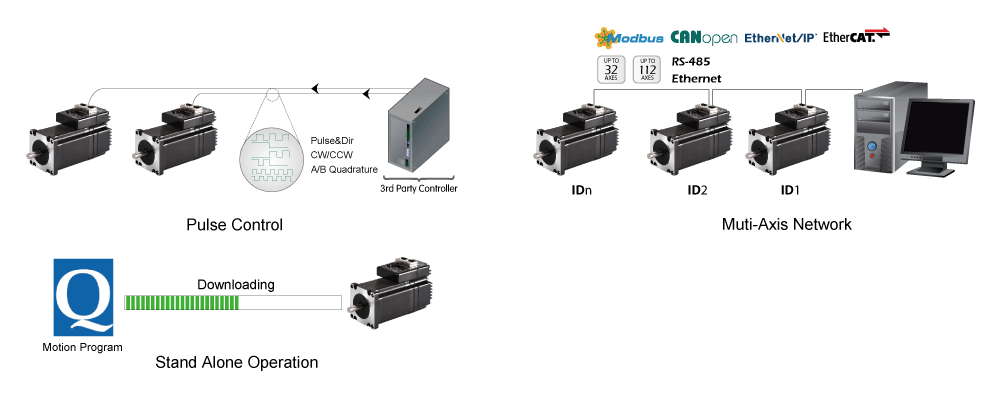
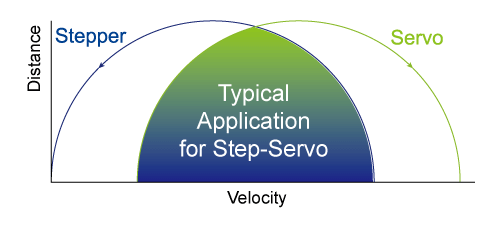
The TSMX series integrated step-servo motors, using high-resolution magnetic encoder design, encoder support single turn absolute value mode. Support torque contorl, velocity control, position control and other control methods. Bus communication options include Modbus/RTU.
● Multi-axis field bus control
● Intelligent built-in controller
● Compact all-in-one solution
● Efficient, smooth, accurate, fast
● Enhanced motor, optimized design
● Intelligent built-in controller
● Compact all-in-one solution
● Efficient, smooth, accurate, fast
● Enhanced motor, optimized design


Brand Name: MOONS'
Payment Methods
 Buyer Protection:
Buyer Protection:
 Free Exchange
Free Exchange 



■ Multi-functional Capability
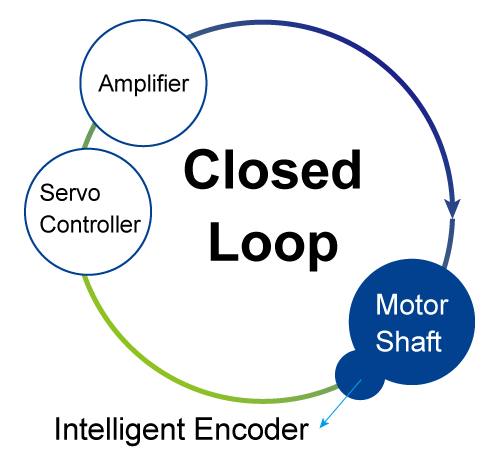
■ Closed-Loop Control
• Smart encoder
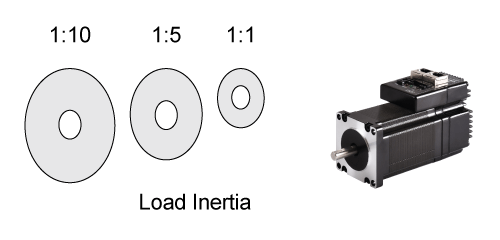
Precise position and speed control to meet more demanding application requirements.Highly robust servo control adapts to a wide range of inertial and friction load variations.
The built-in high precision encoder provides precise position control and position accuracy.
• Closed-loop Step-Servo mode
Position, velocity and current closed loop control.Precisely position and velocity control can match theharsh applications.Adjust the current in real time according to the actual load situation.
Highly robust servo control accommodates a wide range of inertial loads and friction load changes.
■ Safe & Convenient
• Support communication and motor power cables disconnection protection——Make equipments safer
• Support on-line configuration by fieldbus——Make operation more convenient
• Support on-line configuration by fieldbus——Make operation more convenient
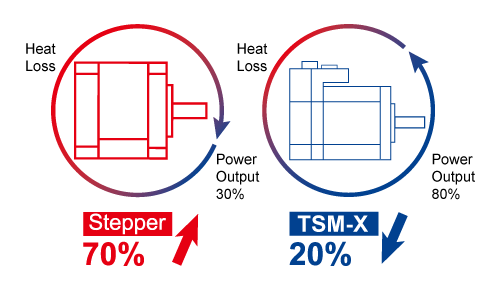
■ Low Heating / High Efficiency
• The TSM-X uses only the current required by the application, generating minimum heat output.
• When the motor is not moving, the current can be nearly zero resulting in extremely low heat output.
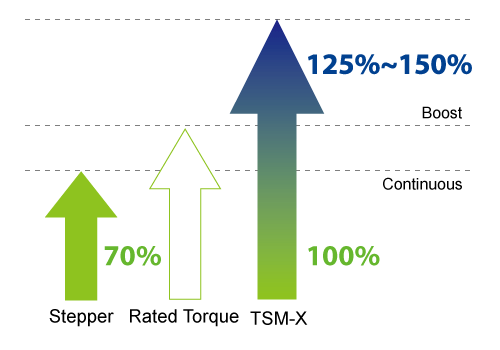
• Being able to use almost 100% of the available torque allows for more efficient operation and may allow a smaller motor size.
• When the motor is not moving, the current can be nearly zero resulting in extremely low heat output.
• Being able to use almost 100% of the available torque allows for more efficient operation and may allow a smaller motor size.
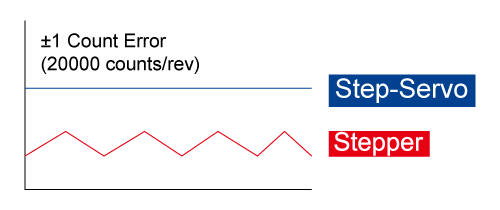
■ Smooth & Accurate
• Space vector current control with a high resolution encoder gives smooth and quiet operation, especially at low speeds - a feature not found with traditional stepper motors.
• High stiffness due to the nature of the stepper motor combined with the highly responsive servo control results in accurate position control both while running and when standing still.
• High stiffness due to the nature of the stepper motor combined with the highly responsive servo control results in accurate position control both while running and when standing still.
■ Fast Response
When performing fast point-to-point moves, the high torque output and advanced servo control provides a very responsive system far exceeding what can be done with a conventional stepper system.
■ High Torque
• Because operates in full servo mode, all the available torque of the motor can be used. The motor can provide as much as 50% more torque in many applications.
• High torque capability often eliminates the need for gear reduction.
• Boost torque capability can provide as much as 50% more torque for short, quick moves.
• High torque capability often eliminates the need for gear reduction.
• Boost torque capability can provide as much as 50% more torque for short, quick moves.
■ Motion Monitoring
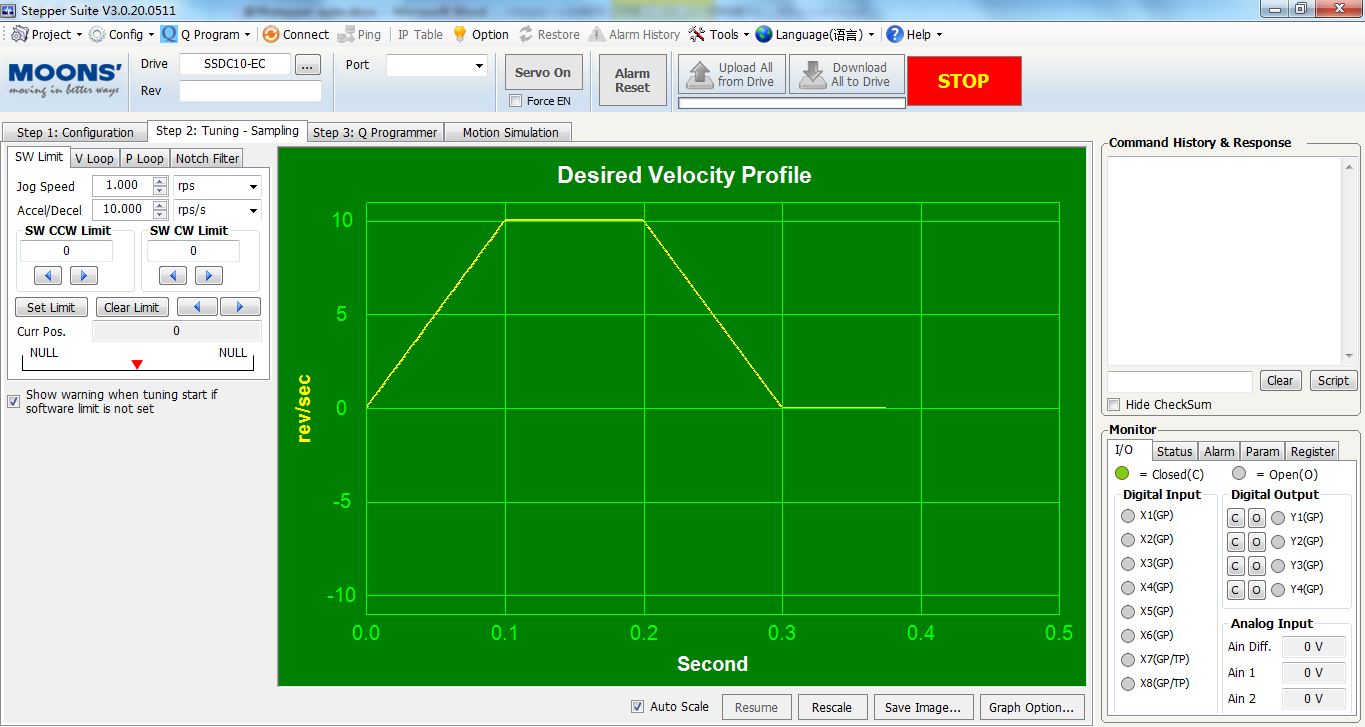
• For applications where extreme real-time motion is critical, the Stepper Suite provides a simple and practical tool for monitoring actual motion trajectories.
• It can be used to monitor common metrics such as actual velocity and position error to assess the current actual performance of the system.
• An interactive monitoring and tuning interface provides the fastest possible performance output.
• It can be used to monitor common metrics such as actual velocity and position error to assess the current actual performance of the system.
• An interactive monitoring and tuning interface provides the fastest possible performance output.
■ Easy Tuning
• Pre-defined tuning parameters quickly allow maximum control performance and stability.
• A selection list provides an easy method to achieve the desired level of control.
• In most cases NO extra manual tuning is required.
• There is no need to do tuning in closed- step mode.
• A selection list provides an easy method to achieve the desired level of control.
• In most cases NO extra manual tuning is required.
• There is no need to do tuning in closed- step mode.
■ Software
Stepper Suite • Friendly User Interface
• Easy setup within just three steps
• Drive setup and configuration
• Servo Tuning and Sampling
• Built-in Q programmer
• Motion testing and monitoring
• Write and save SCL command scripts
• Online help integrated
• Support all products in RSM/SSM/TSM/TXM/RS/SS/SSDC Series and STF Stepper Drive
• Easy setup within just three steps
• Drive setup and configuration
• Servo Tuning and Sampling
• Built-in Q programmer
• Motion testing and monitoring
• Write and save SCL command scripts
• Online help integrated
• Support all products in RSM/SSM/TSM/TXM/RS/SS/SSDC Series and STF Stepper Drive

RS485 Bus Utility • Stream SCL commands from the command line
• Simple interface with powerful capability
• Easy setup with RS-485 for 32 axis network motion control
• Monitoring Status of I/O, drive, alarm and the other nine most
• Write and save SCL command scripts
• Online help integrated
• Supports all RS-485 drives
• Simple interface with powerful capability
• Easy setup with RS-485 for 32 axis network motion control
• Monitoring Status of I/O, drive, alarm and the other nine most
• Write and save SCL command scripts
• Online help integrated
• Supports all RS-485 drives

CANopen Test Tool • Friendly User Interface
• Multiple operation Mode Support
• Multi-Thread, High Performance
• CAN bus monitor and log function
• Kvaser/PEAK adapter support
• Multiple operation Mode Support
• Multi-Thread, High Performance
• CAN bus monitor and log function
• Kvaser/PEAK adapter support
• All software applications run on Microsoft Windows 7, Windows 8, Windows 10, Windows XP(Service Pack 3) 32-bit or 64-bit systems
□ Numbering System
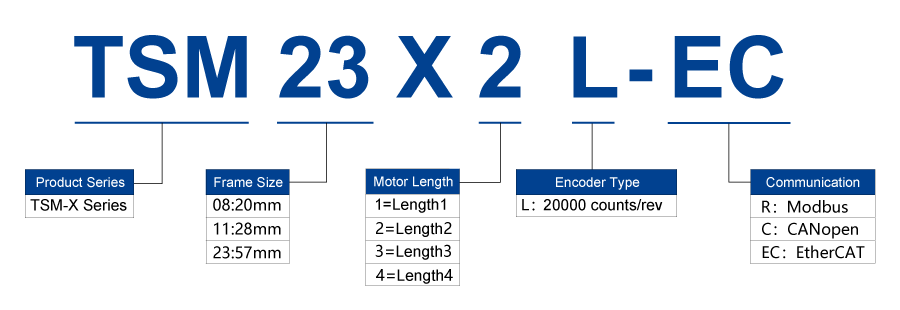
■ Ordering Information
| Model | Voltage | Multi-functional Capability | ||||
|---|---|---|---|---|---|---|
| Pulse | Modbus/RTU | CANopen | EtherCAT | SCL/Q | ||
| TSM08X2L-R | 12-48VDC | √ | √ | √ | ||
| TSM08X3L-R | 12-48VDC | √ | √ | √ | ||
| TSM11X1L-R | 24-70VDC | √ | √ | √ | ||
| TSM11X3L-R | 24-70VDC | √ | √ | √ | ||
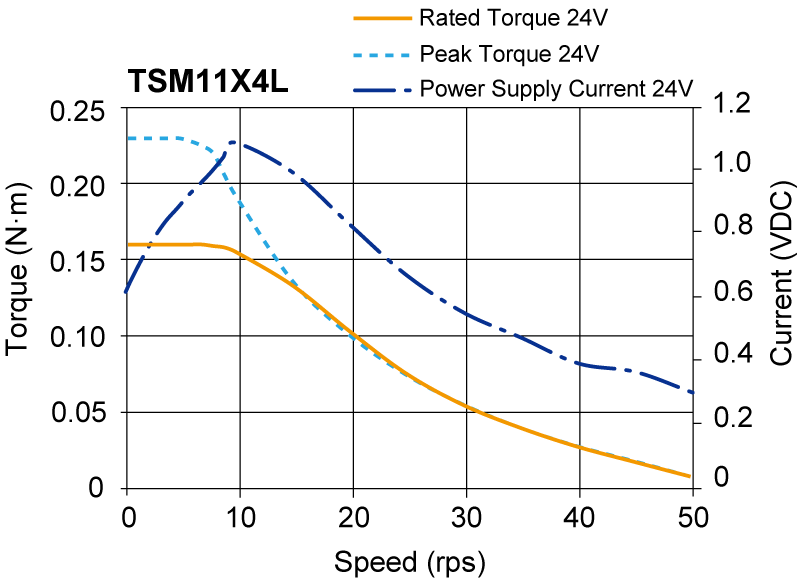
| TSM11X4L-R | 24-70VDC | √ | √ | √ | ||
| TSM11X1L-C | 24-70VDC | √ | √ | |||
| TSM11X3L-C | 24-70VDC | √ | √ | |||
| TSM11X4L-C | 24-70VDC | √ | √ | |||
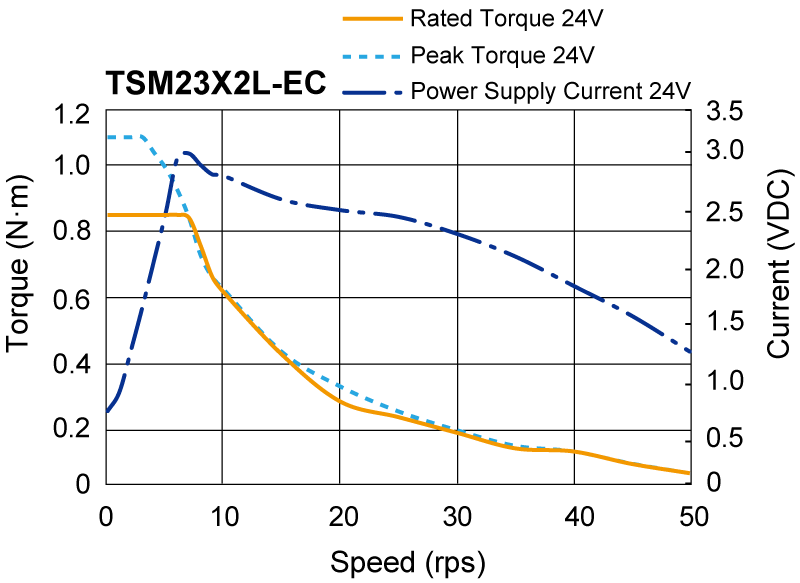
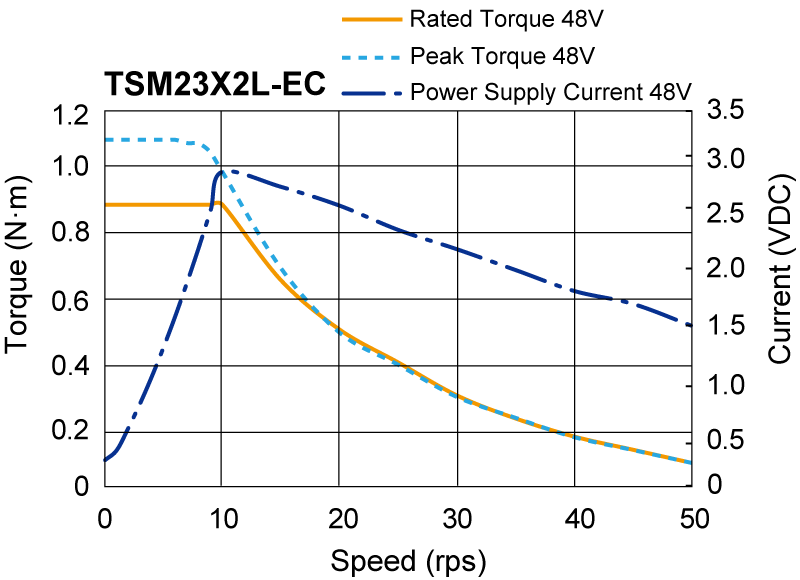
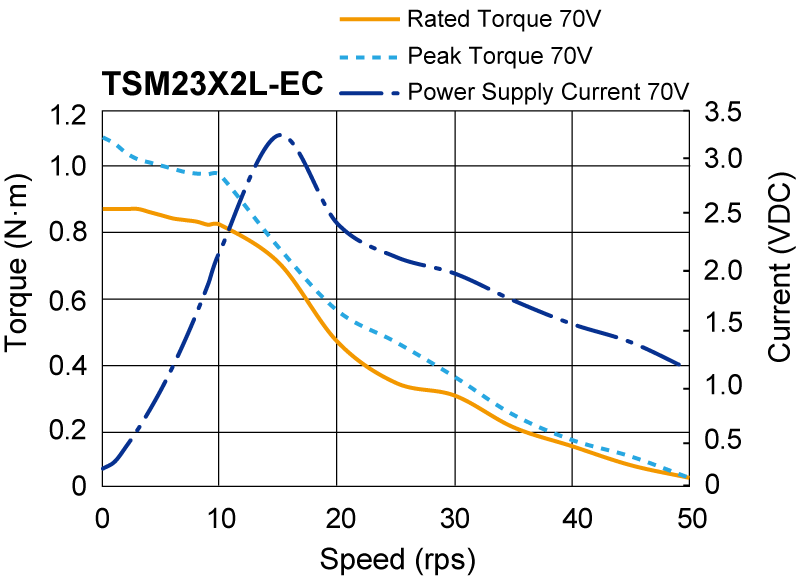
| TSM23X2L-EC | 24-70VDC | √ | √ | |||
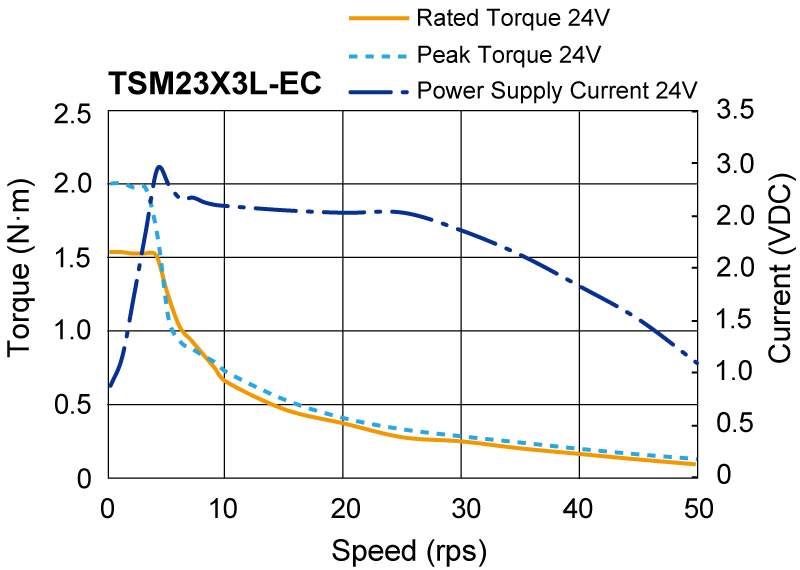
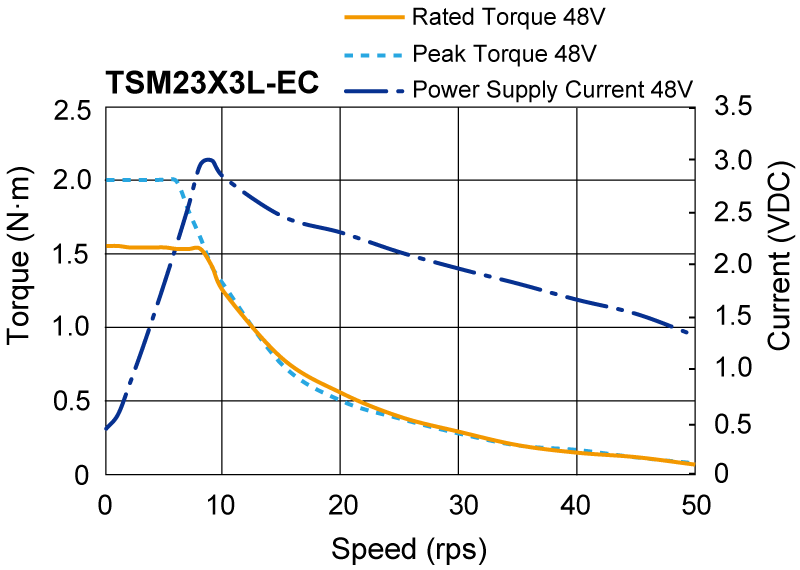
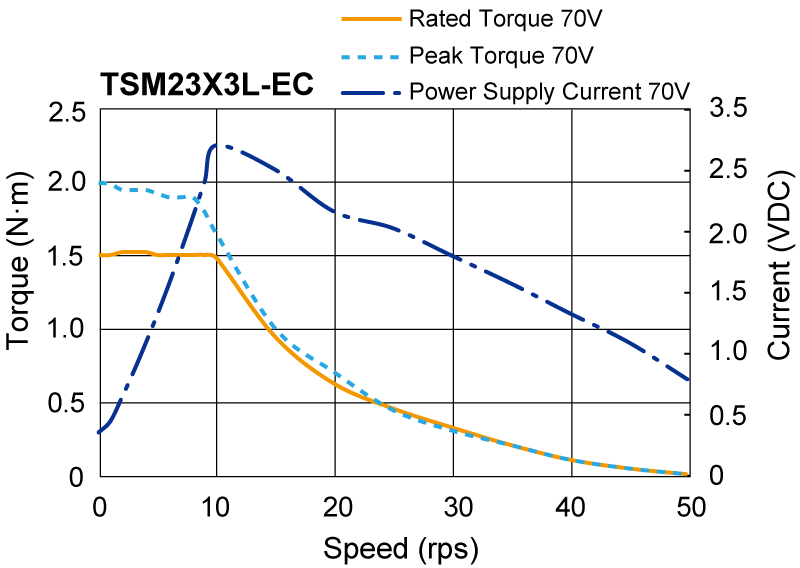
| TSM23X3L-EC | 24-70VDC | √ | √ | |||
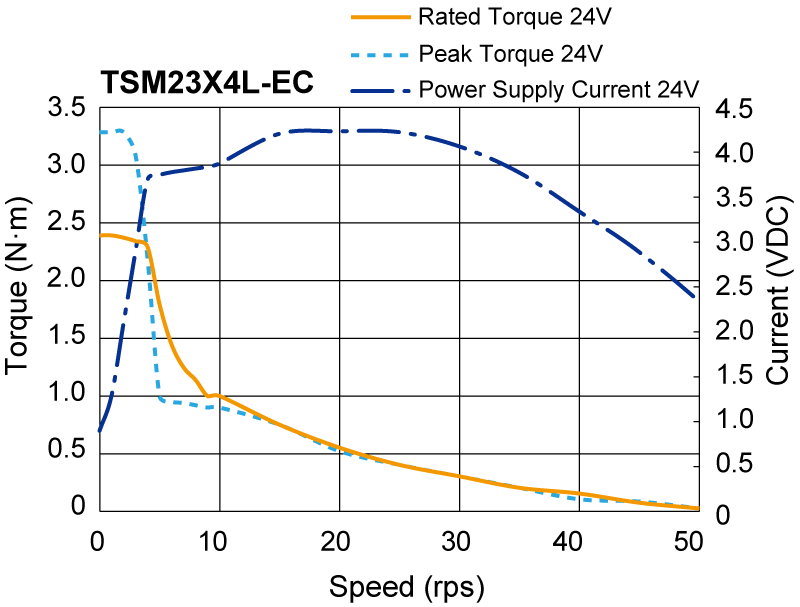
| TSM23X4L-EC | 24-70VDC | √ | √ | |||
■ Modbus
□ TSM08X-R, RS-485 Communication Type
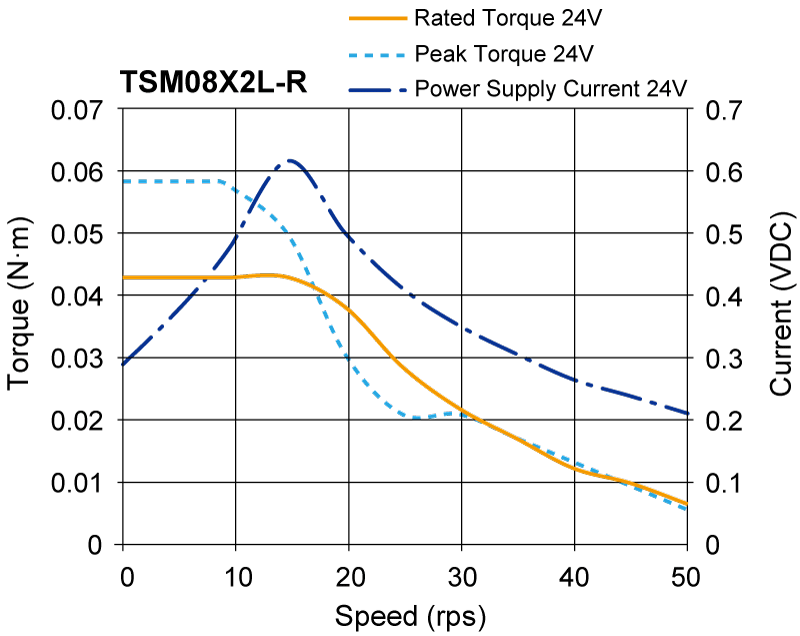
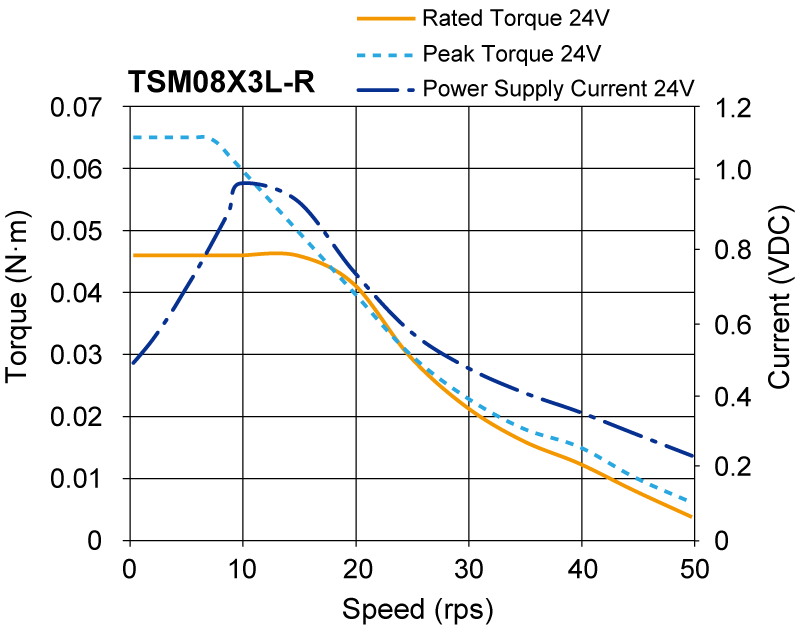
| TSM08X RS-485 Communication Type | TSM08X2L-R | TSM08X3L-R | |||
|---|---|---|---|---|---|
| Power | Input Voltage(VDC) | 24 | |||
| Maximum Input Current (A)*1 | 0.6 | 0.8 | |||
| I/O | Quantity | Digital Input | 3 | ||
| Digital Output | 2 | ||||
| Digital Input | Range Of Input Voltage(VDC) | 5-24 | |||
| Max Pulse Frequency(Hz) | 1M | ||||
| Min Pulse Width (μs) | 100 | ||||
| Port Type | NPN | ||||
| Digital Output | Max Input Voltage(VDC) | 30 | |||
| Max Output Current(mA) | 100 | ||||
| Port Type | OD | ||||
| Environment | Tempreture(℃) | 0-40 | |||
| Moisture Content | 90% Max., non-condensing | ||||
| IP Class | IP20 | ||||
| Protection | Over Tempreture(℃) | ≥ 85 | |||
| Over Current(A) | ≥ 4.1 | ||||
| Over Voltage(VDC) | ≥ 32 | ||||
| Under Voltage(VDC) | ≤ 10 | ||||
| Communication | Configuration Port | RS485/422 | |||
| Bus Protocol | Modbus RTU | ||||
| Bus Port | RS485/422 | ||||
| Motion | Encoder Resolution(counts/rev) | 20000 | |||
| Control Command | Pulse,SCL,Q program,Modbus/RTU | ||||
| Pulse Type | Pulse+Direction,CW/CCW dual pulse | ||||
| Speed Range(RPM) | 0-3000 | ||||
| Motor | Max output Torque(Nm) | 0.04(short-time operation 0.055) | 0.045(short-time operation 0.06) | ||
| Rotor Inertia(gcm²) | 2.9 | 4.2 | |||
| Mass (g) | 80 | 100 | |||
| Frame Size (mm) | 20 | ||||
| Allowed Suspension Load (N) | Distace From The End of The Axis (mm) | 0 | 12 | ||
| 5 | 15 | ||||
| 10 | 20 | ||||
| 15 | / | ||||
| 20 | / | ||||
| Allowable Axial Load (N) | Less than the weight of the motor | ||||
| Note: [1] The actual power current depends on the power voltage and the load. | |||||
□ TSM11X-R, RS-485 Communication Type
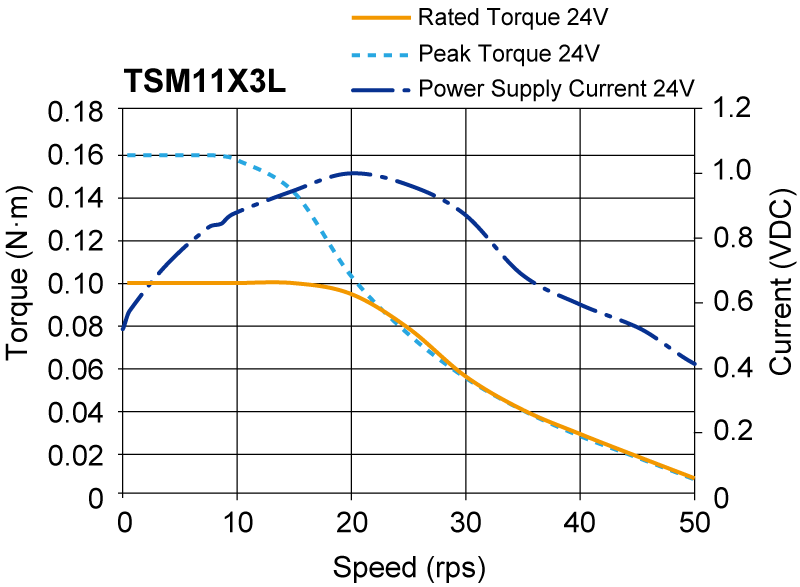
| TSM11X RS-485 Communication Type | TSM11X1L-R | TSM11X3L-R | TSM11X4L-R | |||
|---|---|---|---|---|---|---|
| Power | Input Voltage(VDC) | 24 | ||||
| Maximum Input Current (A)*1 | 0.6 | 1.45 | 1.55 | |||
| I/O | Quantity | Digital Input | 4 | |||
| Digital Output | 2 | |||||
| Digital Input | Range Of Input Voltage(VDC) | X1±,X2±:24 X3,X4:5-24 | ||||
| Max Pulse Frequency(Hz) | Differential inputs:2M | |||||
| Min Pulse Width (μs) | 100 | |||||
| Port Type | NPN | |||||
| Digital Output | Max Input Voltage(VDC) | 30 | ||||
| Max Output Current(mA) | 100 | |||||
| Port Type | OD | |||||
| Environment | Tempreture(℃) | 0-40 | ||||
| Moisture Content | 90% Max., non-condensing | |||||
| IP Class | IP20 | |||||
| Protection | Over Tempreture(℃) | ≥ 85 | ||||
| Over Current(A) | ≥ 8 | |||||
| Over Voltage(VDC) | ≥ 32 | |||||
| Under Voltage(VDC) | ≤ 10 | |||||
| Communication | Configuration Port | RS485/422 | ||||
| Bus Protocol | Modbus RTU | |||||
| Bus Port | RS485/422 | |||||
| Motion | Encoder Resolution(counts/rev) | 20000 | ||||
| Control Command | Pulse,SCL,Q program,Modbus/RTU | |||||
| Pulse Type | Pulse+Direction,CW/CCW dual pulse | |||||
| Speed Range(RPM) | 0-3000 | |||||
| Motor | Max output Torque(Nm) | 0.06(short-time operation 0.09) | 0.1(short-time operation 0.16) | 0.16(short-time operation 0.24) | ||
| Rotor Inertia(gcm²) | 8 | 18 | 24 | |||
| Mass (g) | 116 | 216 | 266 | |||
| Frame Size (mm) | 28 | |||||
| Allowed Suspension Load (N) | Distace From The End of The Axis (mm) | 0 | 20 | |||
| 5 | 25 | |||||
| 10 | 34 | |||||
| 15 | 52 | |||||
| 20 | / | |||||
| Allowable Axial Load (N) | Less than the weight of the motor | |||||
| Note: [1] The actual power current depends on the power voltage and the load. | ||||||
■ CANopen
□ TSM11X-C, CANopen Communication Type
| TSM11X CANopen Communication Type | TSM11X1L-C | TSM11X3L-C | TSM11X4L-C | |||
|---|---|---|---|---|---|---|
| Power | Input Voltage(VDC) | 24 | ||||
| Maximum Input Current (A)*1 | 0.6 | 1.45 | 1.55 | |||
| I/O | Quantity | Digital Input | 4 | |||
| Digital Output | 2 | |||||
| Digital Input | Range Of Input Voltage(VDC) | X1±,X2±:24 X3,X4:5-24 | ||||
| Port Type | NPN | |||||
| Digital Output | Max Input Voltage(VDC) | 30 | ||||
| Max Output Current(mA) | 100 | |||||
| Port Type | OD | |||||
| Environment | Tempreture(℃) | 0-40 | ||||
| Moisture Content | 90% Max., non-condensing | |||||
| IP Class | IP20 | |||||
| Protection | Over Tempreture(℃) | ≥ 85 | ||||
| Over Current(A) | ≥ 8 | |||||
| Over Voltage(VDC) | ≥ 32 | |||||
| Under Voltage(VDC) | ≤ 10 | |||||
| Communication | Configuration Port | RS-232 | ||||
| Bus Protocol | CANopen | |||||
| Bus Port | CAN | |||||
| Motion | Encoder Resolution(counts/rev) | 20000 | ||||
| Speed Range(RPM) | 0-3000 | |||||
| CANopen | Type | Standard CiA 402 protocol | ||||
| Baud Rate (bps) | 12.5k,20k,50k,125k,250k,500k,800k,1M | |||||
| ID | 1-127 | |||||
| Speacification | Heart beat,SDO,PDO | |||||
| Motor | Max output Torque(Nm) | 0.06(short-time operation 0.09) | 0.1(short-time operation 0.06) | 0.16(short-time operation 0.24) | ||
| Rotor Inertia(gcm²) | 8 | 18 | 24 | |||
| Mass (g) | 116 | 216 | 266 | |||
| Frame Size (mm) | 28 | |||||
| Allowed Suspension Load (N) | Distace From The End of The Axis (mm) | 0 | 20 | |||
| 5 | 25 | |||||
| 10 | 34 | |||||
| 15 | 52 | |||||
| 20 | / | |||||
| Allowable Axial Load (N) | Less than the weight of the motor | |||||
| Note: [1] The actual power current depends on the power voltage and the load. | ||||||
■ EtherCAT
□ TSM23X-EC, EtherCAT Communication Type
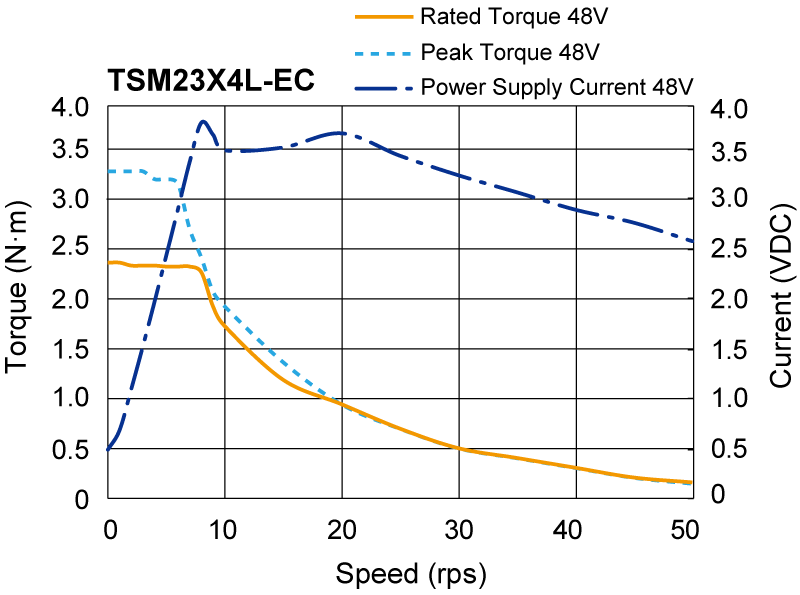
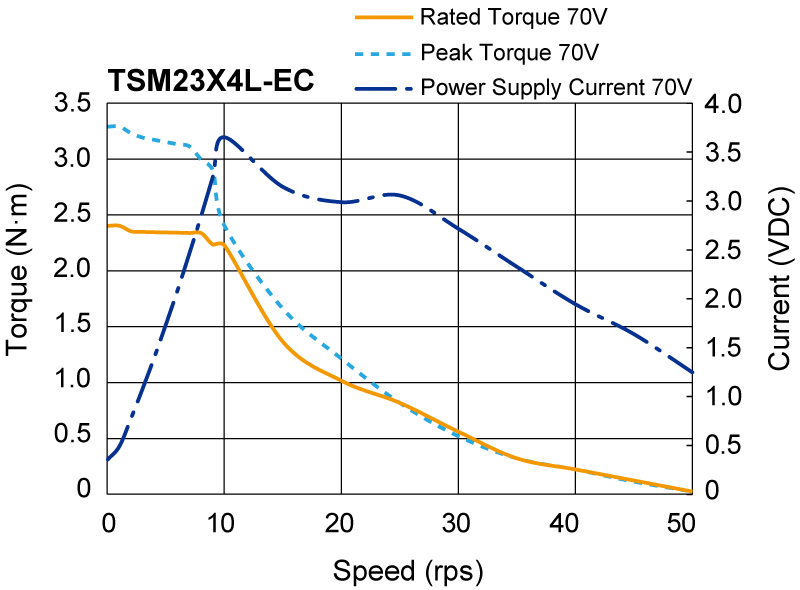
| TSM23X EtherCAT Communication Type | TSM23X2L-EC | TSM23X3L-EC | TSM23X4L-EC | |||
|---|---|---|---|---|---|---|
| Power | Input Voltage(VDC) | 12-70 | ||||
| Maximum Input Current (A)*1 | 3 | 3 | 4 | |||
| I/O | Quantity | Digital Input | 6 | |||
| Digital Output | 3 | |||||
| Digital Input | Range Of Input Voltage(VDC) | 5-24 | ||||
| Port Type | NPN,PNP | |||||
| Digital Output | Max Input Voltage(VDC) | 30 | ||||
| Max Output Current(mA) | 100 | |||||
| Port Type | OC | |||||
| Environment | Tempreture(℃) | 0-40 | ||||
| Moisture Content | 90% Max., non-condensing | |||||
| IP Class | IP20 | |||||
| Protection | Over Tempreture(℃) | ≥ 95 | ||||
| Over Current(A) | ≥ 17.5 | |||||
| Over Voltage(VDC) | ≥ 90 | |||||
| Under Voltage(VDC) | ≤ 10 | |||||
| Communication | Configuration Port | USB mini-B | ||||
| Bus Protocol | EtherCAT | |||||
| Bus Port | RJ45 | |||||
| Motion | Encoder Resolution(counts/rev) | 20000 | ||||
| Speed Range(RPM) | 0~3000 | |||||
| EtherCAT | Setting ID | Host or software | ||||
| Speacification | SDO、PDO、CoE、VoE | |||||
| Motion Mode | PP,PV,PT,CSP,CSV,Homing,Q Program | |||||
| Motor | Max output Torque(Nm) | 1.0(short-time operation 1.3) | 1.5(short-time operation 2.0) | 2.4(short-time operation 3.2) | ||
| Rotor Inertia(gcm²) | 8 | 18 | 24 | |||
| Mass (g) | 910 | 1260 | 1270 | |||
| Frame Size (mm) | 57 | |||||
| Allowed Suspension Load (N) | Distace From The End of The Axis (mm) | 0 | 20 | |||
| 5 | 25 | |||||
| 10 | 34 | |||||
| 15 | 52 | |||||
| 20 | / | |||||
| Allowable Axial Load (N) | Less than the weight of the motor | |||||
| Note: [1] The actual power current depends on the power voltage and the load. | ||||||
| Compare | Item | Price (USD) |
|---|---|---|
|
|
TSM08X2L-R | |
|
|
TSM08X3L-R | |
|
|
TSM11X1L-R | |
|
|
TSM11X3L-R | |
|
|
TSM11X4L-R | |
|
|
TSM11X1L-C | |
|
|
TSM11X3L-C | |
|
|
TSM11X4L-C | |
|
|
TSM23X2L-EC | |
|
|
TSM23X3L-EC | |
|
|
TSM23X4L-EC |
□ TSM08X
□ TSM11X
□ TSM23X
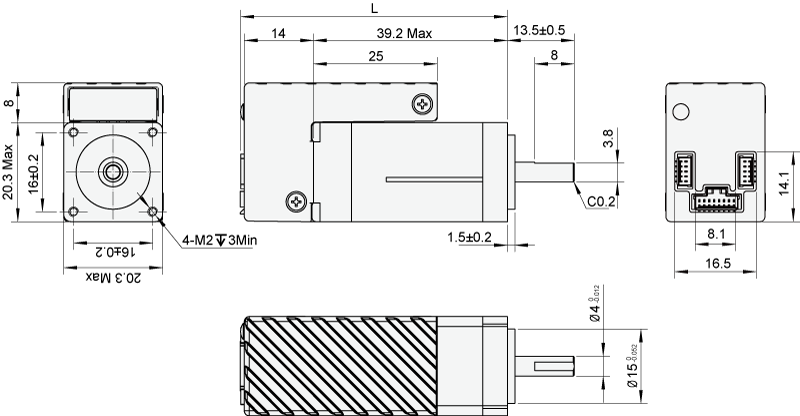
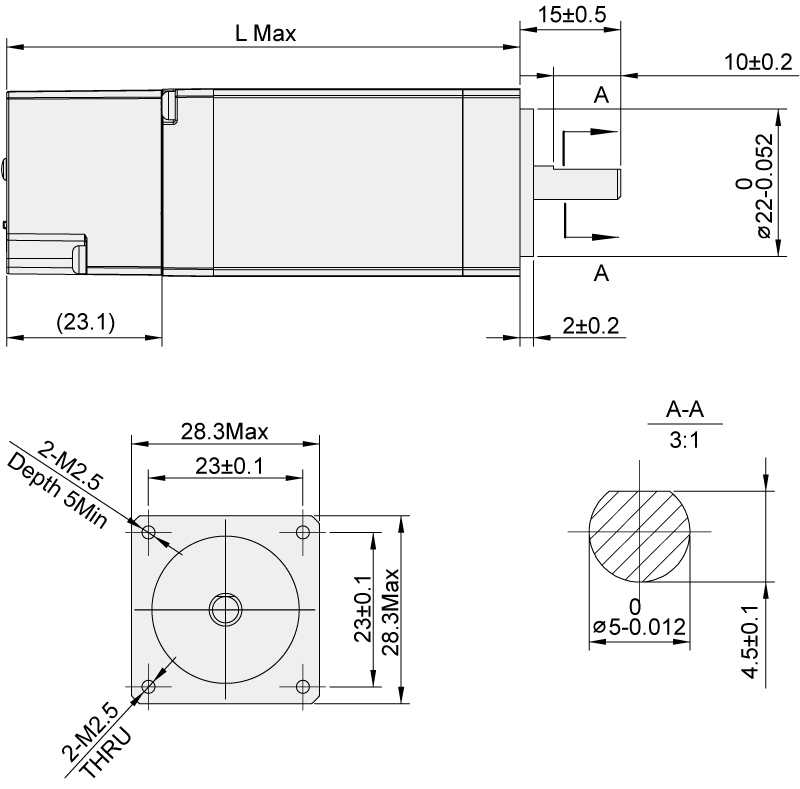
■ Dimension (Units: mm)
□ TSM08X Series
| Model | “L” |
|---|---|
| TSM08X2L-R | 54 |
| TSM08X3L-R | 61 |
□ TSM11X Series
| Model | “L” |
|---|---|
| TSM11X1L-R | 56.2 |
| TSM11X3L-R | 76.5 |
| TSM11X4L-R | 86.3 |
| TSM11X1L-C | 56.2 |
| TSM11X3L-C | 76.5 |
| TSM11X4L-C | 86.3 |
□ TSM23X Series
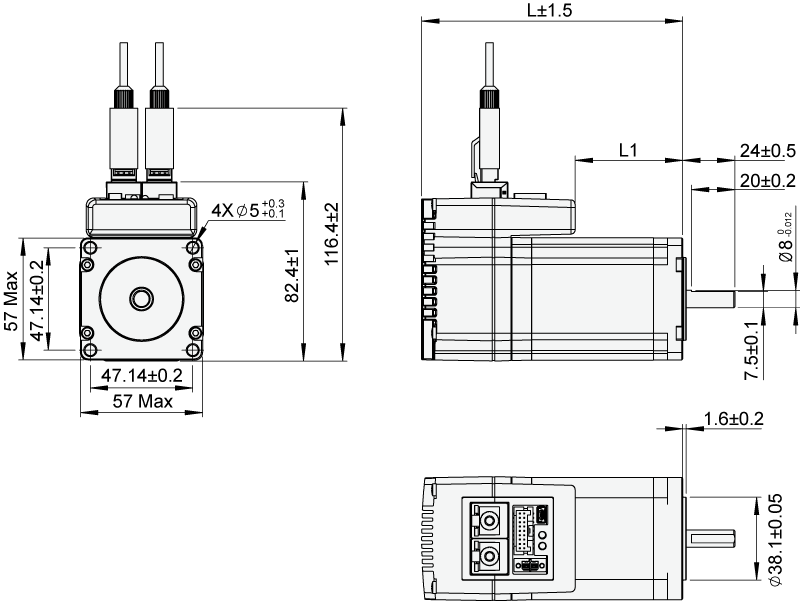
| Model | “L” | “L1” |
|---|---|---|
| TSM23X-2L-EC | 95.1 | 24.5 |
| TSM23X-3L-EC | 117.1 | 46.5 |
| TSM23X-4L-EC | 120.1 | 49.5 |
2D Drawings
| Title | Type | Size(KB) | Download |
|---|---|---|---|
| TSM11X4L-C 2D.pdf | 930 | ||
| TSM11X1L-R 2D.pdf | 926 | ||
| TSM11X3L-R 2D.pdf | 929 | ||
| TSM11X4L-R 2D.pdf | 930 | ||
| TSM08X2L-R 2D.pdf | 442 | ||
| TSM23X4L-EC 2D.pdf | 303 | ||
| TSM08X2L-R.dwg | DWG | 204 | |
| TSM23X3L-EC 2D.pdf | 316 | ||
| TSM11X3L-C 2D.pdf | 930 | ||
| TSM23X2L-EC 2D.pdf | 302 | ||
| TSM11X1L-C 2D.pdf | 929 | ||
| TSM08X3L-R.dwg | DWG | 204 | |
| TSM08X3L-R 2D.pdf | 441 |
3D Model
| Title | Type | Size(KB) | Download |
|---|---|---|---|
| TSM23X3L-EC 3D.STEP | STEP | 17134 | |
| TSM11X4L-C 3D.stp | STEP | 6440 | |
| TSM11X3L-R 3D.stp | STEP | 3850 | |
| TSM08X2L-R.stp | STEP | 10539 | |
| TSM23X4L-EC 3D.STEP | STEP | 17127 | |
| TSM11X4L-R 3D.stp | STEP | 6440 | |
| TSM11X1L-R 3D.stp | STEP | 3850 | |
| TSM08X2L-R 3D.stp | STEP | 7369 | |
| TSM08X3L-R.stp | STEP | 10441 | |
| TSM23X2L-EC 3D.stp | STEP | 8451 | |
| TSM08X3L-R 3D.stp | STEP | 7098 | |
| TSM23X4L-EC 3D.stp | STEP | 8399 | |
| TSM23X2L-EC 3D.STEP | STEP | 17127 | |
| TSM23X3L-EC 3D.stp | STEP | 8594 | |
| TSM11X3L-C 3D.stp | STEP | 3850 | |
| TSM11X1L-C 3D.stp | STEP | 3850 |
Brochure
| Title | Type | Size(KB) | Download |
|---|---|---|---|
| TSM-X Family Brochure_EN20250513.pdf | 13864 |
User Manual
| Title | Type | Size(KB) | Download |
|---|---|---|---|
| HOST COMMAND reference uesr manual.pdf | 6963 | ||
| TSM08X Hardware Manual EN20250414.pdf | 2691 | ||
| TSM23X-EC Hardware Manual_EN20230829.pdf | 3796 |
Certification
| Title | Type | Size(KB) | Download |
|---|---|---|---|
| ROHS declaration-2026-A0.pdf | 178 | ||
| Integrated Step-Servo Motor CE Certification.pdf | 1430 |
Software
| Title | Type | Size(KB) | Download |
|---|---|---|---|
| Stepper Suite Setup 4.0.25.1015.zip | ZIP | 24089 | |
| AMA Step-Servo EtherCAT v3.2.18.zip | XML | 190 |
Filter By Product Type
All ProductsRegen Clamp

Delivery & Packaging
Ensure your ordered products are always safely packaged from easy click to fast delivery to your handsProfessional Product Label
Considering all possible harsh application environments, MOONS' specially designed labels for each product, which pass water-resistance test, durability rub test, high temperature resistance and corrosion resistance tests.Besides, our product labels are attached with QR code linking to product details, which is convenient for clients to view the detail product page with their mobile phones.

Note: This label design is suitable for products of stepper motor.


(Professional packing box and unique appearance design)
(Single item packed with EPE)


(Multi-products packed with another box)
Safely Packaging
In order to ensure your shipments withstand the long trip and arrive safely and intact, MOONS' specially designed Individual package to pass the drop test with its stable structure.Besides,the package is made from recyclable materials, providing you with professional safety delivery.
Whether just single item or multi-products the clients buy, all products are packed twice to avoid the damage further.
Shipping Visualization
For each case, products are carefully packed by experienced warehouse staff and the key processes are recorded by photos, which are then posted on our website, so that clients could clearly know the packing process and logistics status after placing order.

(Product in the box)


(Add the invoice)


(Label the commodity)

(The logistics waybill attached)

Fast Delivery
Fast Cross-Border DeliveryMOONS' chooses DHL as our main international express shipping partner. As the world's leading logistics specialist, DHL provides our customers with fast and professional inter- national door-to-door delivery service.
Estimated Delivery Time: e.g. China-USA major cities 3 business days.
Professional
Warehouse Management
